Basic essentials on the relative movement
Introduction
Back with the whole universe of steemit lover of the scientific publication, again in field of the physics in reference to the movement, for this occasion we have: basic essentials on the relative movement, like previous opportunities I have already shared big variety on the content of the movement like article and also under the audio-visual scheme, but before of entering matter we must have cooking on the general study of the movement, since to be able to define a movement of an ordinary way for saying about this one form form, it is necessary to depart from a system of reference, from the point of view of observation with the sense of detailing the phenomena physicist inside this context, that owes to itself partners to whom there does not exist any system of reference that remains immobile, since inside our universe and spaces like particles, elements and mass are in continuo movement, in such a way that all this reference of conditions causes to the so-called absolute system of reference, where there are demonstrated different characteristics of the mobiles that go to do studied.
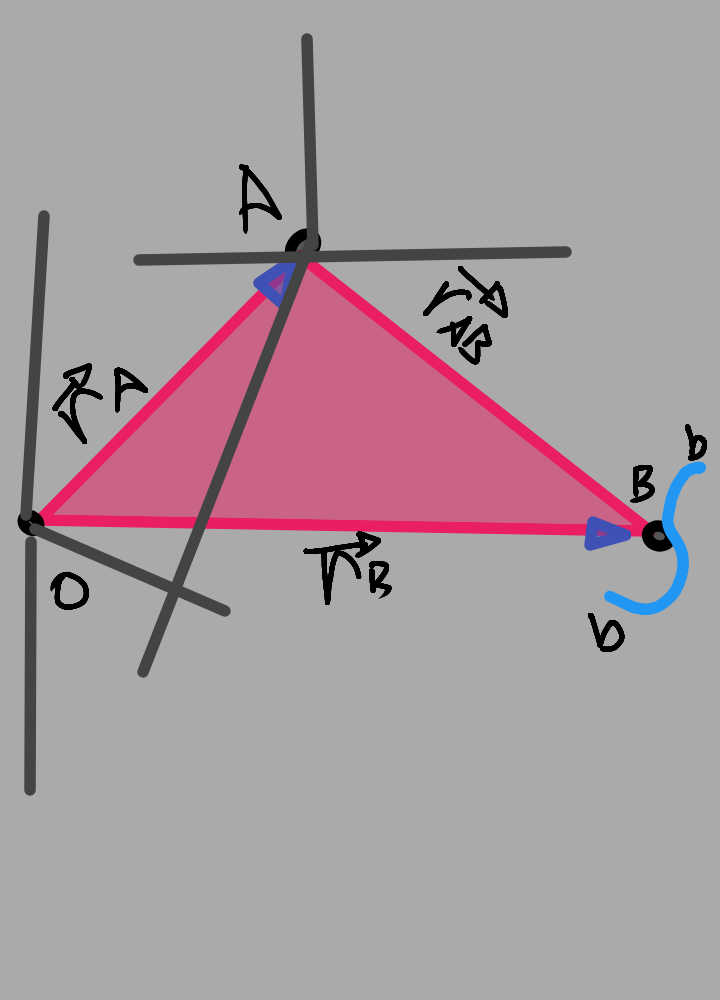
It is necessary to know when a body or this particle exercising an absolute movement is the displacement of a body from an absolute place to other, for this case of the phenomenon of movement, when we speak at the moment relatively we allude reading friend in the following thing; when this one moves or changes place being this of rest making possible a referential frame of his relative position, which is designated by means of a vector of relative position, it is for it as which the absolute movement has many different moments, since it always occupies always same parts of spaces, in contrast to relatively this movement where his state which parts do not correspond constantly to same parts of the space that this one occupies, his reference vectorial goes to be defined by the distances of the bodies that surround them.
Another important information is that thanks to the movement, for his analysis mathematical models are used with the application of vectors, where it is possible to define this one with the position of the mobile, particle, matters, in order to evidence the position of this one according to an interval of time.
Δr = r(t+ Δt)-r(t)
In this very simple equation it allows us for determining the displacement of a body, where the difference of vectors in his already fully definite positions, it is observed to determine the position of this one in two moment different and different time in his trajectory as the way covered by the mobile, where Δr is the increase of the trip of the vector according to two moment in deferential trip and different time, r is the vector of the mobile and t the time, Δt is the difference of two moment covered in time different.
Relative movement
In reference to this movement relative my dear partners, the fact is that this one is going to depend on the select system of reference, since this type of physical phenomenon is a part of the kinematics, which deals with finding relations of models mathematician where the equations relate the vectors of position, including that thing about speed and acceleration that different observers measure, for being able to describe this movement of relative and not absolute forms. In the case that a particle is in movement in the referential one if his position with regard to him, it changes this one into the passing of time, but if it was in the opposite case, the particle is at rest in referential saying.
To have a dynamic idea what it is a question of explaining with this type of phenomenon of movement of a mobile with other as this observer always going to be at rest and for that they are of foreign form like external observers for saying it this way, his speed will be different so that partners take it in account, already cheese sight as a proper speed of the observer, the most fascinating thing is that a fixed system of reference does not exist in the space in what we see as universe, but if the so called absolute one, if the most curious thing is that all they displace the system with constant speed with regard to dignified with of absolute, as part of a system inercial, with field of facilitating the unknown that arises to the moment to relate the equations of movements, already there is the relative one to the moments to study from several system system of reference, it is for it that the system inercial constitutes that one that is at rest or that this mobile moves itself with constant speed where it is demonstrated that it has no acceleration. The vectors position, speed and acceleration of a particle will have in general different value depending on the system of reference from the one that they are calculated.
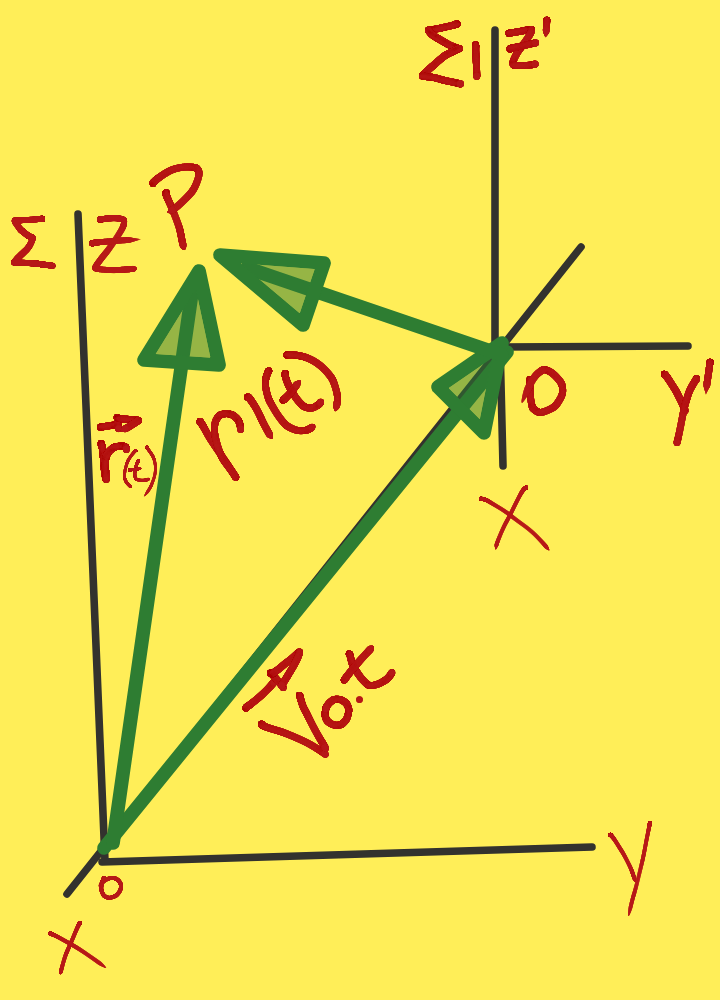
Next we have the following example where he shows us and explains regarding this phenomenon of movement, considering a system inercial, where they should be the sumatoria of the topic Σ and Σ1, where this two system inerciales in which it is demonstrated that this one moves himself the second one with a speed in V0 with regard to the first one, where he is two observers of a fixed way, to have knowledge of this one, so that they could measure the intervals of time of fixed form, of such a way synchronizes two time one for O and O1 in order to t = t0=t1, after a moment partners in time t one of the particles or mobile will have a definite vector of position supporting the system inerciales for r and r1, of such a way so that in another system it is demonstrated with V0 with regard to the first one already previously established in a following simple way in the equation: r (t) = r1 (t) + V0 (t), given this one of after formation because a point causes us in P, for both systems well is for the Vth (t) and V1 (t), then this one is derived as system of equations giving like: The Vth (t) = V1 (t) + V0. In order to demonstrate that the acceleration is invariable in all used as reference for this case, since one is be able to cause a rectilinear uniform movement with with regard to one of them that is fixed, staying force is equal applied and also his acceleration that they are they practise in the intervals of time given.
When two points or more points move with rectilinear movement, to describe his movement we can write separated equations, the points can move along the same different straight line or along retasting. Information consulted in mechanical Engineering. Dynamics. The IInd for William F. Riley, Leroy D. Sturges, Page 28, 1996.
Consulted bibliography
[1] Mechanical engineering. Dynamics. The IInd for William F. Riley, Leroy D. Sturges, Page 28, 1996.

Great job!
@tipu curate
Upvoted 👌 (Mana: 15/20 - need recharge?)
Hello greetings and thanks for his valuable support