El Diagrama de Williot en Estática Aplicada
¡Saludos y bienvenidos! Esta publicación va dedicada a la aplicación de un procedimiento gráfico llamado Diagrama de Williot en la determinación los desplazamientos de los puntos de cadenas cinemáticas de 1 grado de libertad. Este Diagrama está cercanamente relacionado a los Diagramas Cartesianos de Desplazamiento, abordados en el siguiente artículo:
•Diagramas cartesianos de desplazamiento en sistemas materiales de 1 grado de libertad
Todo el contenido sobre Estática Aplicada (1160) se ha recopilado en la siguiente publicación:
La diferencia entre los Diagramas Cartesianos de Desplazamiento y el Diagrama de Williot radica en que este último representa los desplazamientos a través de un par de ejes perpendiculares con un origen dado, sin particularizar los desplazamientos en sus dos componentes horizontal y vertical.
Introducción
En la Estática Aplicada, el Diagrama de Williot es un diagrama alternativo de desplazamiento aplicado para representar gráficamente los desplazamientos de los puntos de cadenas cinemáticas de 1 grado de libertad (1 GL). El movimiento de las chapas (cuerpos rígidos) del sistema viene dado por rotaciones de orden infinitesimal, las cuales dan origen a desplazamientos de los cuales solo tomaremos en cuenta la componente tangencial, es decir, el desplazamiento que se da de manera perpendicular al radio vector que une el polo de la chapa con el punto en cuestión. Este diagrama debe su nombre al Ingeniero francés Joseph Victor Williot (1843-1917) quien lo desarrolló en 1877 para determinar las deflexiones en las juntas de cerchas (armaduras) producto de deformaciones axiales de los miembros de la misma. Sin embargo, su método poseía ciertas limitantes dadas por las condiciones de apoyo de las cerchas.
Este diagrama constituye un método gráfico que con el tiempo ha sido poco a poco excluido de los cursos de Estática Aplicada, al igual que otros métodos gráficos (por ejemplo, los métodos de la Estática Gráfica para determinar la resultante de fuerzas en un sistema sometido a cargas, el polígono de fuerzas y el polígono funicular). Sin embargo, este diagrama se suele aplicar en cursos más avanzados de la carrera de Ingeniería Civil para calcular desplazamientos en estructuras como cerchas (armaduras) una vez conocida la deformación axial de cada elemento o en el método de las fuerzas para estructuras hiperestáticas. Cuando entran en juego deformaciones de elementos estructurales, se suele emplear el “Diagrama de Williot-Mohr”, ya que fue desarrollado por Christian Otto Mohr (Ingeniero Civil alemán), quien fuera entusiasta por este tipo de herramientas gráficas (al igual que el Círculo de Mohr de esfuerzos bidimensionales), para superar las deficiencias del Diagrama de Williot.
A pesar de ser desarrollado para cerchas estructurales, el Diagrama de Williot ha sido aplicado a sistemas materiales compuestos por cadenas cinemáticas de 1 GL por autores como Hernández, S (1998) y Rodríguez, I. (2003), por lo que en esta publicación se abordará el Diagrama de Williot para dichos sistemas ya que su metodología constituye una base práctica para la construcción del Diagrama de Williot-Mohr para la determinación de desplazamientos en estructuras. En tal sentido, se debe de conocer previamente los centros instantáneos de rotación (polos) del sistema material para poder determinar la forma en cada chapa de este presentará movimiento.
Trazado del Diagrama de Williot
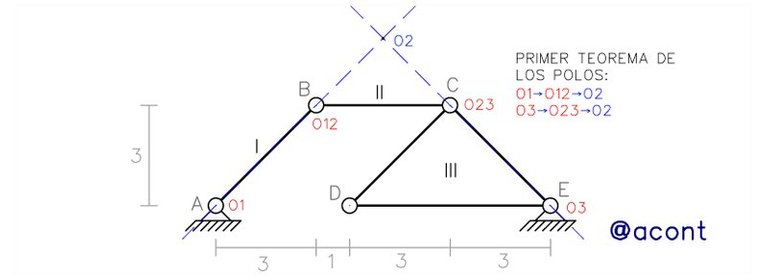
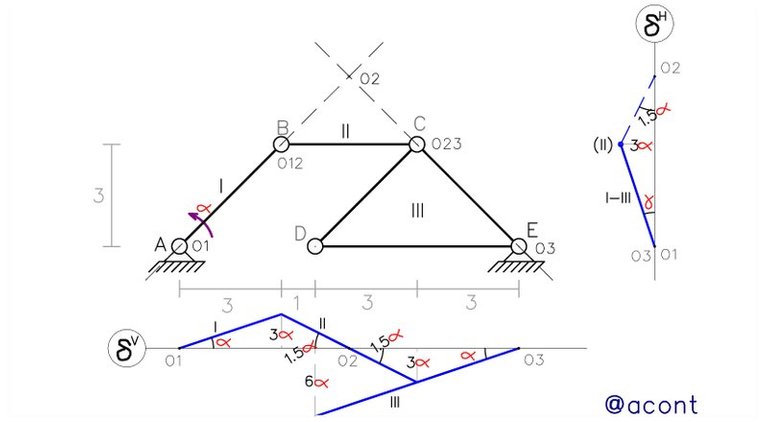
Se da el siguiente sistema material de 1 GL, en el cual se han hallado previamente los polos (Fig. N°1).
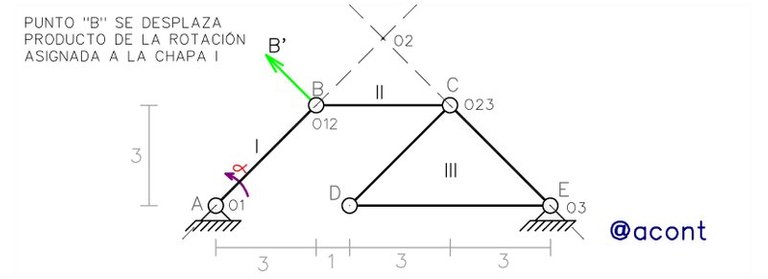
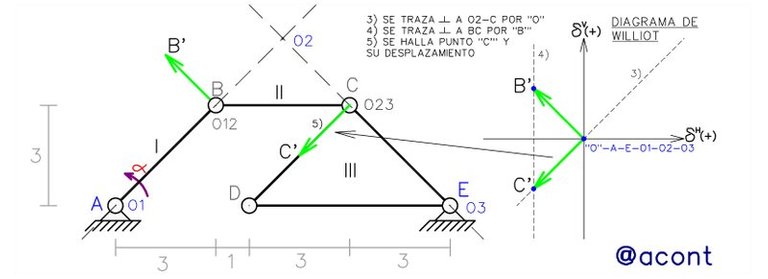
Similar a los Diagramas Cartesianos de Desplazamiento, se le asigna una rotación infinitésima arbitraria “α” a una de las chapas. En este caso, se le asignará esta rotación la chapa I en sentido antihorario. Producto de esta rotación infinitésima, el punto “B” de dicha chapa experimentará un desplazamiento dado de manera perpendicular al radio vector que une el polo de la chapa I con este punto, por lo que el punto “B” llega a una nueva posición “B’” (Fig. N°2).
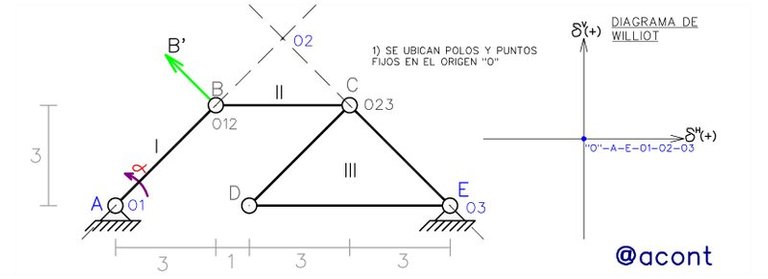
Seguidamente, procedemos a graficar el Diagrama de Williot del sistema material. Para ello trazamos un par de ejes perpendiculares entre sí: un eje vertical para los desplazamientos verticales y un eje horizontal para los desplazamientos horizontales. Sobre el origen “O” de dichos ejes se ubican los puntos del sistema material que no presentan movimiento y los polos absolutos del mismo. En el caso de polo absoluto en el infinito, este no se representa en el origen. En la Fig. N°3 se observa este primer paso en el trazado del Diagrama de Williot.
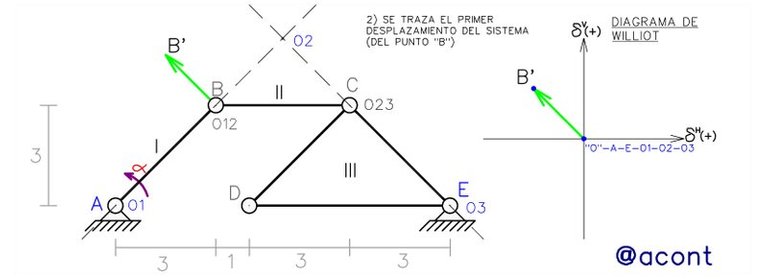
El desplazamiento del punto “B” puede ubicarse en el diagrama, dando lugar a la ubicación del punto “B’” en el mismo. La magnitud de este desplazamiento no es relevante a efectos de dibujo, puesto que los desplazamientos de los demás puntos del sistema se determinarán gráficamente a partir de este (Fig. N°4).
Si se requiere precisión, se puede determinar la magnitud exacta del desplazamiento de “B” (por ejemplo “5α”) y trazar una línea de “5” unidades de longitud a través del origen “O” del diagrama en dirección perpendicular al radio vectorO1-B. Gráficamente se determinará de manera exacta el desplazamiento del resto de los puntos del sistema, en relación a esta línea inicial de “5” unidades.
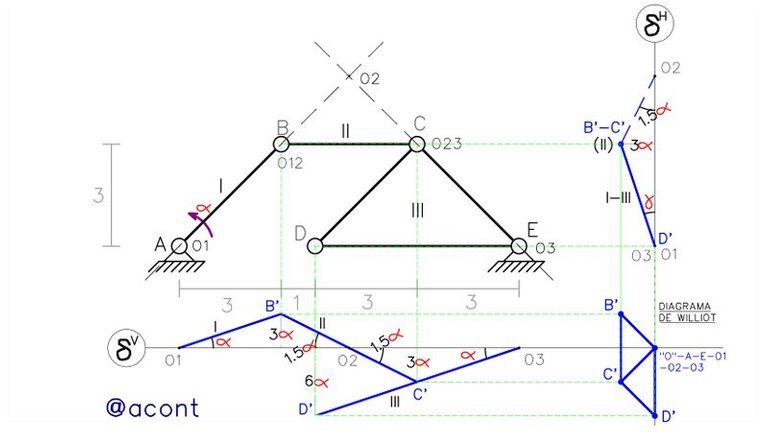
El siguiente punto es “C”. El procedimiento para determinar la ubicación de puntos internos en el Diagrama de Williot consiste en determinar dos direcciones en las cuales su intercepción representa el punto dado. Debido a esto, se trazarán dos direcciones: por el origen “O” una dirección perpendicular al radio vector que va desde el polo “O2” hasta el punto “C”; y por el punto “B’” otra dirección perpendicular a la dirección “BC”. De esta manera, se determina el punto “C’” en el diagrama de Williot (Fig. N°5).
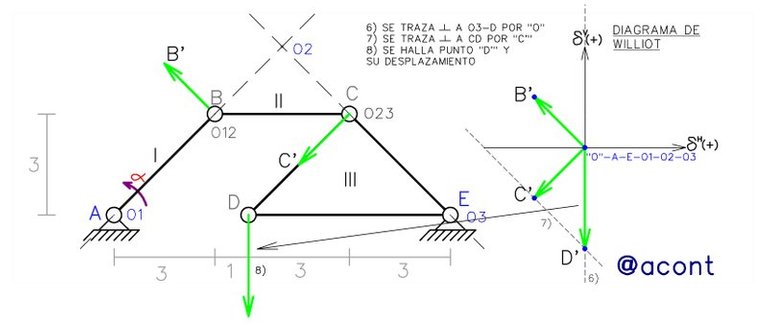
Para encontrar el punto “D” se procede de manera similar. Se traza por “C’” una dirección perpendicular a la dirección “CD” y por el origen “O” una dirección perpendicular al radio vector que va desde el polo de la chapa III (ya que es la chapa donde se encuentra este punto) hasta el punto “D”. Obteniendo así el punto “D’” en el Diagrama de Williot (Fig. N°6).
Una vez hallados todos los puntos del sistema en el Diagrama de Williot, se deben unir los puntos que estén dentro de la misma chapa. Por ejemplo, la unión de los puntos “C’”, “D’” y “E’” conforman la chapa III, y los puntos “B’” y “E’” no se van a unir mediante una línea porque no están vinculados entre sí en el sistema material (Fig. N°7).
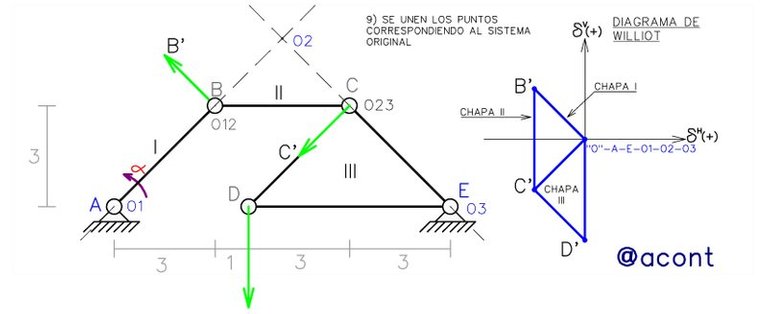
De esta manera, se construye el Diagrama de Williot del sistema. Se puede observar que este diagrama representa las chapas de manera normal, es decir, rotadas 90° respecto al sistema original. Se ve que la chapa II conformada por los puntos “B” y “C” se encuentra totalmente vertical en el diagrama, y el triángulo “CDE” se encuentra girado 90° respecto al sistema original. En la Fig. N°7 se observa además que el punto que presenta mayor desplazamiento es el punto “D”, mientras que el punto “B” es el único que se desplaza hacia arriba.
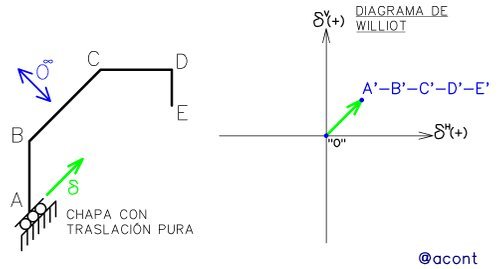
Caso particular: chapa que presenta traslación pura.
Cuando una chapa posee su polo absoluto en el infinito presenta traslación pura, por lo que todos sus puntos tienen la misma magnitud y dirección de desplazamiento. Es por ello, que en el Diagrama de Williot, dicha chapa se verá reflejada como un solo punto, puesto que todos sus puntos sufren exactamente el mismo desplazamiento (Fig. N°8).
El Diagrama de Williot ha sido hasta ahora elaborado de manera metódica siguiendo ciertos pasos. No obstante, existe una forma de trazar el Diagrama de Williot sin seguir todos estos pasos y esta consiste en utilizar los Diagramas Cartesianos de Desplazamiento como base.
Relación con el Diagrama Cartesiano de Desplazamiento
El Diagrama Cartesiano de Desplazamiento se relaciona de manera muy cercana al Diagrama de Williot ya que ambos representan el desplazamiento de cualquier punto de una cadena cinemática de 1 GL sometido a una rotación arbitraria de magnitud infinitésima asignada a alguna de sus chapas. Debido a esto, el Diagrama de Williot se puede relacionar directamente con el Diagrama Cartesiano de Desplazamiento interceptando las coordenadas horizontales y verticales del desplazamiento de cada punto en los ejes cartesianos.
Para ilustrar esto, en la Fig. N°9 se ha realizado el Diagrama Cartesiano de Desplazamiento del sistema material de la Fig. N°1.
Para trazar el Diagrama de Williot en la Fig. N°9, basta con trazar líneas de referencia que intercepten el desplazamiento horizontal y vertical de cada punto en los ejes cartesianos, para de esta manera hallar el punto correspondiente en el Diagrama de Williot (Fig. N°10).
Podemos notar que el Diagrama de Williot posee su origen “O” en la intersección de ambos ejes cartesianos. De esta manera, llegamos al mismo resultado que en la Fig. N°7.
Para mostrar un ejemplo más complejo, se realizará el Diagrama de Williot al sistema material mostrado en la Fig. N°10 del artículo Diagramas cartesianos de desplazamiento en sistemas materiales de 1 grado de libertad, cuyos Diagramas Cartesianos de Desplazamiento ya están realizados.
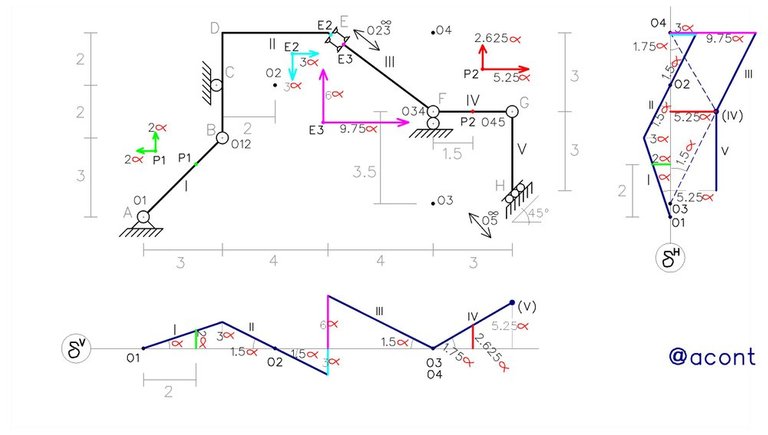
Ejecutando el mismo procedimiento, se interceptan las coordenadas de desplazamiento de cada punto en cada eje cartesiano para así generar el Diagrama de Williot en la intercepción de ambos (Fig. N°12).
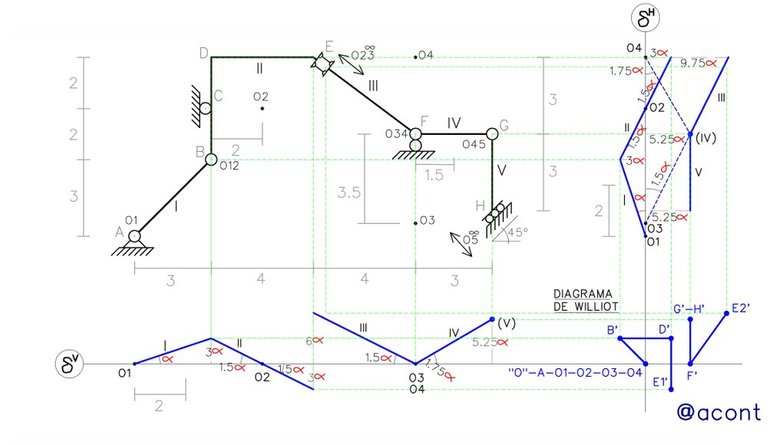
Obteniendo así una descripción aún más detallada de los movimientos de los puntos del sistema material mostrado. Se observa que los puntos “E2” y “E3” no están vinculados entre sí en el Diagrama de Williot, esto con el objetivo de diferenciar el desplazamiento de ambos, puesto que las bielas paralelas particularizan en desplazamiento de este punto para las chapas II y III.
En el próximo artículo, se abordará el Principio del Trabajo Virtual para Cuerpos Rígidos, y su aplicación en la Estática Aplicada para determinar las reacciones en sistemas isostáticos sometidos a un conjunto de cargas externas. De esta manera, de ahora en adelante mis publicaciones darán paso hacia el análisis de sistemas isostáticos, es decir, sistemas estables, para de alguna manera “pasar la página” de los sistemas materiales de 1 grado de libertad y su análisis bajo movimientos infinitésimos y brindar un enfoque hacia el cálculo de fuerzas, momentos, solicitaciones, etc., elementos que conforman la base del cálculo estructural en la Ingeniería Civil.
Conclusiones
Referencias Bibliográficas
[1]Gere, J. M. y Goodno, B. J. (2008). Mechanics of Materials, SI Edition. Cengage Learning.Fuente
[2]Hernández, Suilio. (1998). Estática Aplicada. Folleto Editado por el Departamento de Ingeniería Estructural U.C.V. Caracas.Fuente
[3]Rodríguez, Iván. (2003). Estática de las Estructuras.Fuente
[4]Christian Otto Mohr de Wikipedia, la enciclopedia libre.Fuente
Material recomendado
•@acont. ESTÁTICA APLICADA: análisis por movimiento infinitésimo de sistemas materiales de 1 grado de libertad
•@acont. Diagramas cartesianos de desplazamiento en sistemas materiales de 1 grado de libertad
Imágenes y ecuaciones de autoría propia realizadas mediante LibreCAD y Microsoft Word.
Ing. Ángel Contreras
This post has been voted on by the SteemSTEM curation team and voting trail. It is elligible for support from @curie and @minnowbooster.
If you appreciate the work we are doing, then consider supporting our witness @stem.witness. Additional witness support to the curie witness would be appreciated as well.
For additional information please join us on the SteemSTEM discord and to get to know the rest of the community!
Thanks for having used the steemstem.io app and included @steemstem in the list of beneficiaries of this post. This granted you a stronger support from SteemSTEM.
Fe de errata: en la Fig. N°12 el Diagrama de Williot muestra los puntos "E1'" y "E2'", lo correcto sería "E2'" y "E3'" ya que así se nombraron estos puntos previamente.