🔬#MESExperiments 19: A Gyroscope is an Inverted Pendulum Without Electronic Sensors
In #MESExperiments 19 I demonstrate that gyroscopes are a special form of inverted pendulums in that they don’t need any electronic feedback loop controls to balance or rise against gravity all on their own. This is one of the most fascinating capabilities of gyroscopes but is almost as fascinating and perplexing as how the entire world has missed out on this feat of gravity defying proportions. Although gyroscopes and spinning tops have always been inverted pendulums in principle, it is this particular experiment that shows that they are also inverted pendulums in form and appearance as well.

I demonstrate this inverted pendulum property of gyroscopes by showcasing two experiments involving a custom low friction gimbal setup on a string: the first with a light counterweight in which the gyroscope "forces its own precession" and the second with a heavy counterweight that requires manually forcing the precession initially.
Firstly, for an overview of inverted pendulums, as well as discussion into what "precession" may truly be, make sure to watch my game-changing #MESScience 1 video: https://peakd.com/messcience/@mes/messcience-1-how-does-a-powerball-gyroscope-work-gyros-are-inverted-pendulums
Gyro Test #1: Light Counterweight
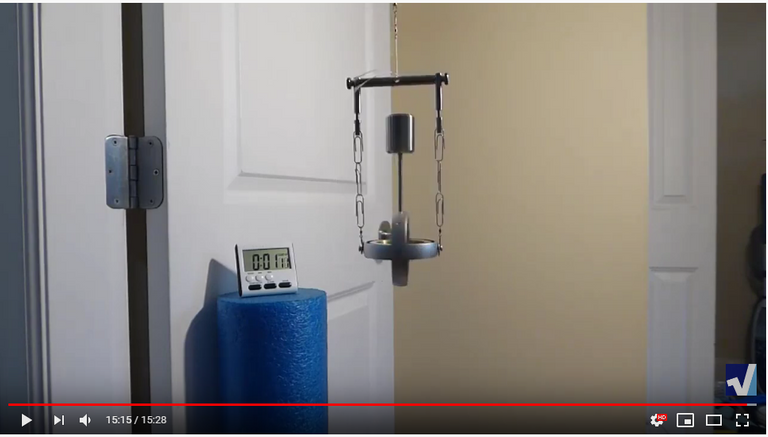
This experiment involves placing a light 6.60 gram counterweight with a 4.60 gram and 55 mm long stem onto a 148.68 gram gyroscope that is placed in a custom gimbal setup hung via a string to minimize rotational friction.
- The original unedited video for this experiment can be found here: https://youtu.be/PaD9tBYT7s4
The sequence of events in this experiment is shown below:
Initially the gyro is tilted at an angle of about 45 degrees.
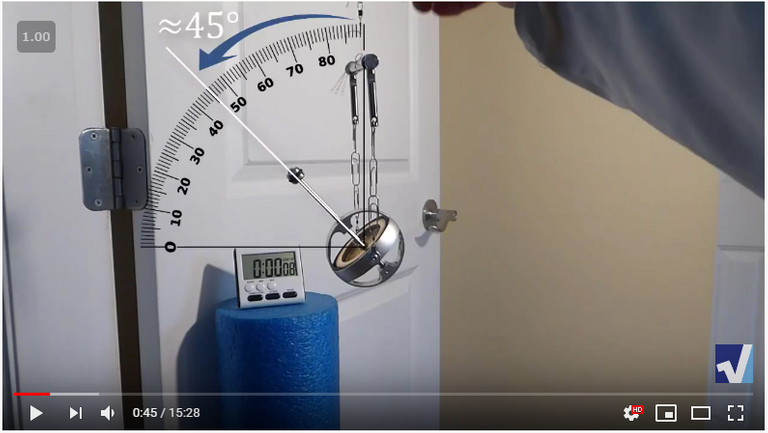
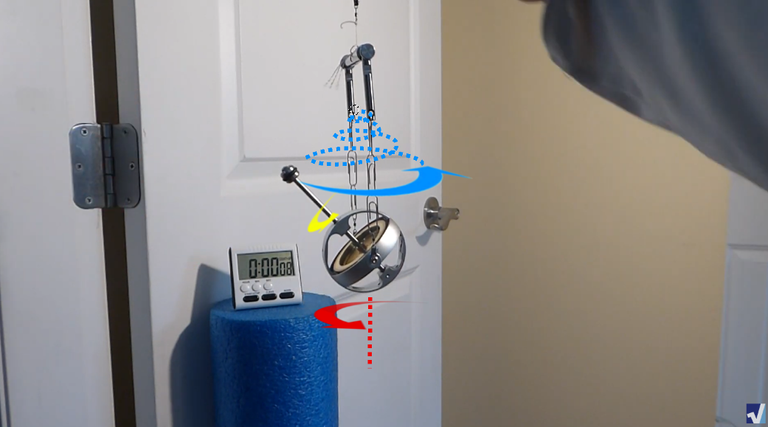
Note as always, the gyro spin and precession directions always want to align against the direction of applied torque even if it means magically spiraling upwards against gravity.
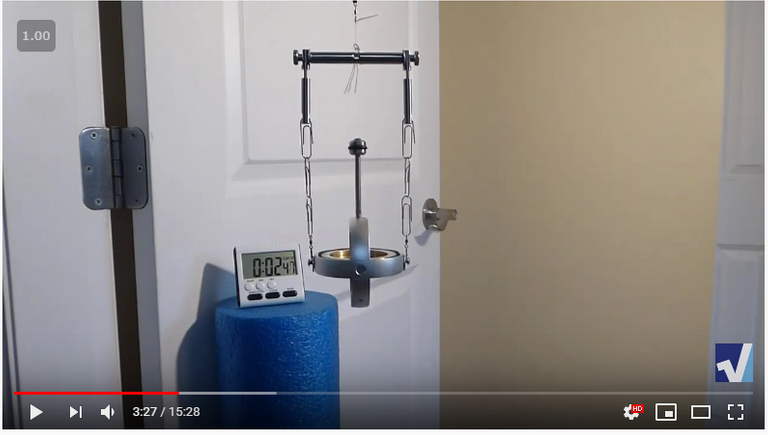
The counterweight rises in about 2:39 and thus exhibiting the form of an inverted pendulum.
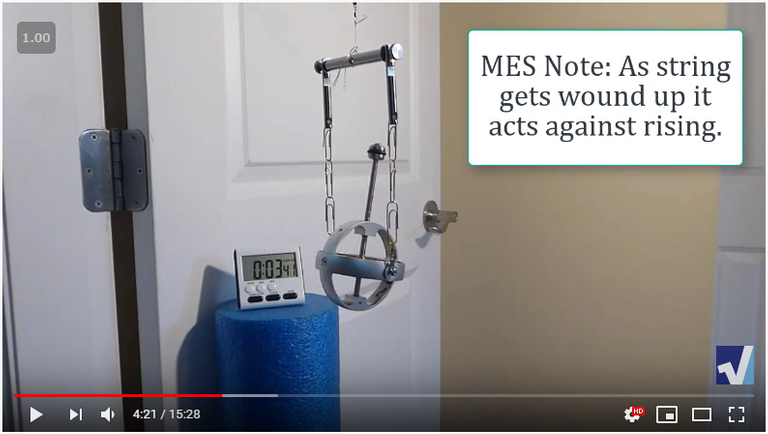
The gyro self-balances in the upright inverted pendulum position for almost 2 minutes before the continuous winding of the string acts as rotational counter-precessional torque, thus acts to gradually drop the counterweight; the gradual loss of gyro spin speed also acts to hinder rising.
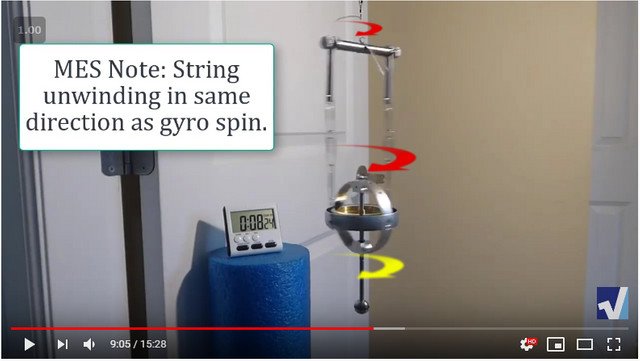
Once the counterweight drops fully down it is no longer torquing the gyro thus the only torque remaining is the string torque as it unwinds in the direction of the gyro spin super fast while, as expected, the counterweight doesn't rise during the string unwinding.
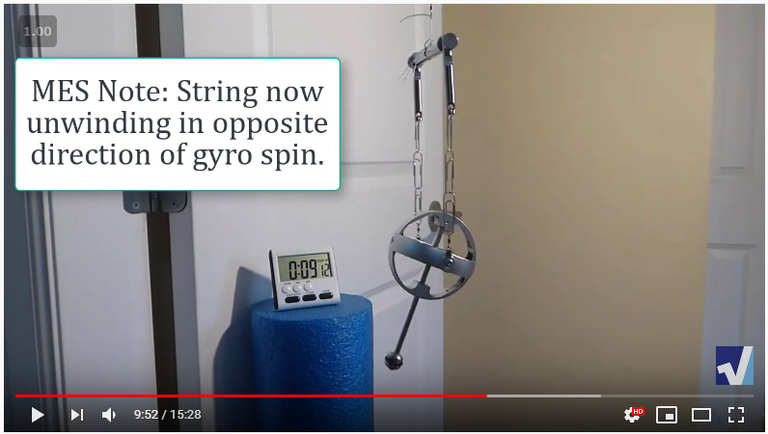
Once the string winds up again it starts to unwind now in the opposite direction of the gyro spin which thus acts to "hurry the precession" and thus cause the counterweight to rise upwards.

Gyro Test #2: Heavy Counterweight
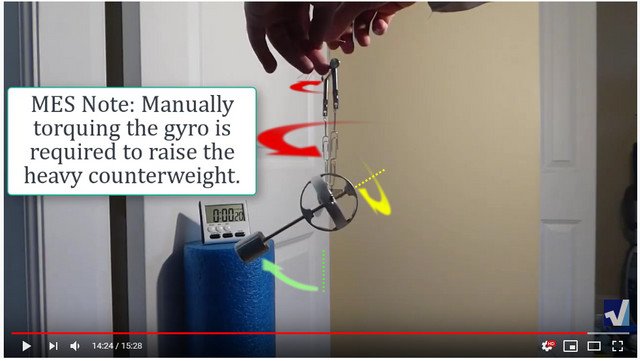
At the 13:35 mark I have included a second experiment which is similar to the first but involves a much heavier 148.68 gram counterweight. The weight is too much for this current gyro to raise on its own initially so I have manually torqued the gyro by slightly (i.e. torque over-unity) turning the gimbal to "hurry the precession" which magically causes the counterweight to rise upwards. Once in the upright position the gyro is able to balance against gravity as an inverted pendulum.
- Note that the original unedited version video can be seen here: https://youtu.be/ubujSK_XiYE
The sequence of events in this test is shown below:

The much heavier counterweight requires manually torquing the gyro view the gimbal support. This torque (opposite to the direction of the gyro spin) can be very gradual since the gyro magically converts it to raising the counterweight against gravity and can maintain this risen position during precession until further torque is applied. As in #MESScience 1, the amount of torque applied indicates the amount of "torque over-unity" and rate of rising are achieved: the less torque applied the more the torque over-unity but the slower the rate of rising; and vice versa.
Also note that the counterweight has significant "rotational inertia" so I am holding the string support tightly to prevent the counterweight from moving outwards centrifugally when I am applying the torque.
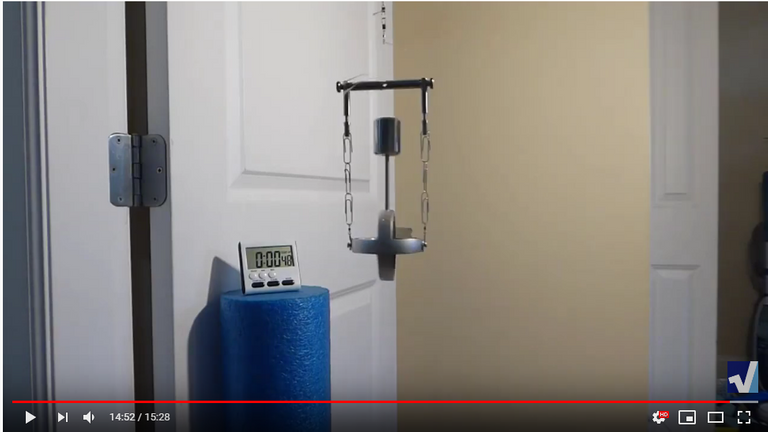
Once fully risen, the gyro can now automatically balance even the heavy weight and hence demonstrate its remarkable inverted pendulum ability.
The effect of the string winding up torque is much more significant for this heavy counterweight test and thus the gyro is able to only stay upright for about 20 seconds before it starts falling.
Also near the end, I apply a large counter torque against the precession which causes the counterweight to drop dramatically fast.

In order for the gyroscope to lift the heavy counterweight on its own, a larger "spin angular momentum" (i.e. combination of larger mass and faster spin speed) is required; or just to lower the amount of counterweight torque by moving the string support more in the middle, as in #MESExperiment 9.
Retrieved: 3 January 2020
Archive: https://archive.ph/Oa2H6

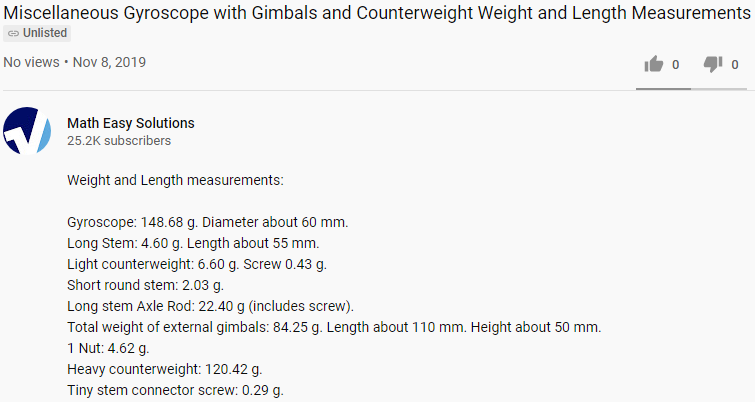
Weight and Length Measurements
The gyro and counterweight weight and length measurements are shown below.
Retrieved: 25 November 2019
Archive: https://archive.ph/Zo8R5




Stay Tuned for #MESExperiments 20…
Watch Video On:
- 3Speak: https://3speak.tv/watch?v=mes/zlsjctuz
- Odysee: https://odysee.com/@mes:8/mesexperiments-19-a-gyroscope-is-an:5
- BitChute: https://www.bitchute.com/video/ybaJTsb0btcZ/
- Rumble: https://rumble.com/v1v8bw6-mesexperiments-19-a-gyroscope-is-an-inverted-pendulum-without-electronic-se.html
- DTube: https://d.tube/#!/v/mes/vny6i4povkk
- YouTube: https://youtu.be/GcPO2pKaiO0
View More Amazing Videos:
- #MESExperiments Video Series: https://peakd.com/experiments/@mes/list
- DRAFT #MESExperiments Video Series: https://mes.fm/experiments-draft
- #MESScience Video Series: https://peakd.com/science/@mes/tutorials
- #AntiGravity Video Series: https://peakd.com/antigravity/@mes/series
- #FreeEnergy Video Series: https://mes.fm/freeenergy-playlist