[ESP/ENG] Programación de Microcontroladores para Tareas en Tiempo Real (RTOS) 🕒⚙️ //Programming Microcontrollers for Real-Time Tasks (RTOS) 🕒⚙️
[ESP]
¡Hola a todos los apasionados de la electrónica y la programación! 👋
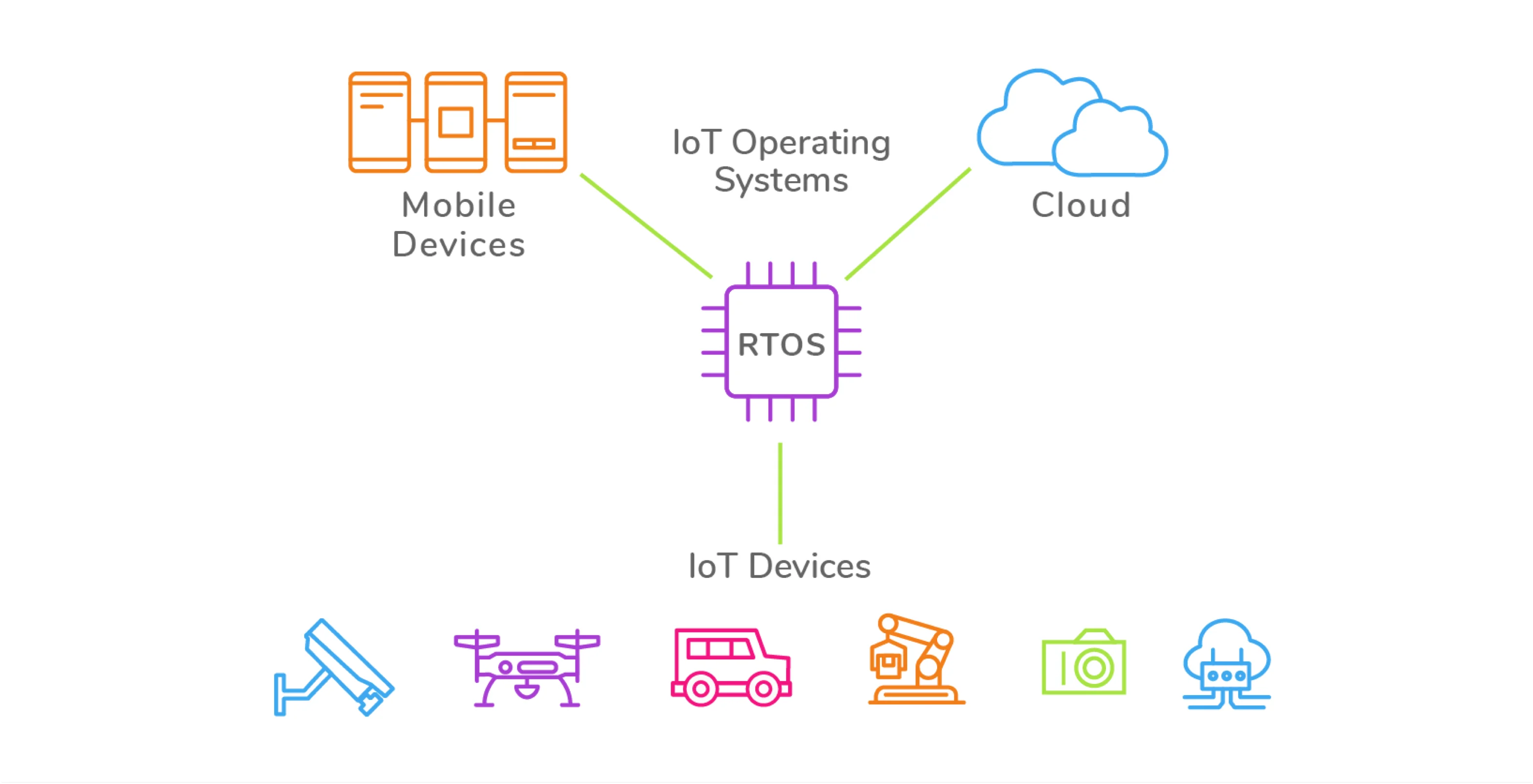
Hoy vamos a sumergirnos en el fascinante mundo de la Programación de Tareas en Tiempo Real usando un Sistema Operativo de Tiempo Real (RTOS). Este enfoque es fundamental para aplicaciones que requieren una respuesta rápida y predecible, como sistemas embebidos, robótica, automóviles y dispositivos IoT. En esta publicación, te guiaré a través de los conceptos clave del RTOS, cómo funciona y cómo puedes implementarlo en proyectos con microcontroladores como Arduino o ESP32. 🚀💡
¿Qué es un RTOS (Real-Time Operating System)? 🕒
Un RTOS (Real-Time Operating System) es un sistema operativo diseñado para gestionar tareas que deben cumplir con restricciones de tiempo estrictas. A diferencia de un sistema operativo general, un RTOS asegura que las tareas se ejecuten en el momento adecuado con la prioridad correcta, manteniendo la previsibilidad y minimizando el tiempo de latencia.
Características Principales:
- Multitarea determinista: Gestiona múltiples tareas de forma simultánea, asegurando que las más importantes se ejecuten primero.
- Planificación de tareas: Basado en prioridades, donde las tareas críticas se ejecutan antes que otras de menor prioridad.
- Interrupciones rápidas: Un RTOS es capaz de manejar interrupciones de hardware con tiempos de respuesta rápidos.
Ejemplos de RTOS comunes:
- FreeRTOS: Uno de los RTOS más populares y ampliamente utilizado en microcontroladores como ESP32 y STM32.
- ChibiOS: Sistema operativo ligero y eficiente para sistemas embebidos.
- VxWorks: RTOS utilizado en aplicaciones industriales y aeroespaciales.
¿Por qué Utilizar un RTOS en Microcontroladores? ⚙️
En proyectos con microcontroladores, a menudo es necesario gestionar múltiples tareas simultáneamente, como leer sensores, controlar motores y gestionar la comunicación. Un RTOS facilita esta gestión eficiente de tareas, asegurando que cada una de ellas se ejecute en el momento adecuado sin interferencias innecesarias.
Beneficios del Uso de un RTOS:
- Gestión de Multitarea: Permite ejecutar varias tareas sin interrupciones y con tiempos de respuesta predecibles.
- Optimización del tiempo de CPU: Al dividir el tiempo de procesamiento entre tareas según su prioridad.
- Control Preciso: Ideal para sistemas de control en tiempo real, como drones, sistemas de seguridad o aplicaciones médicas.
Tareas en Tiempo Real: Soft Real-Time vs. Hard Real-Time 🕑🕛
Existen dos tipos de sistemas de tiempo real que debes conocer al trabajar con RTOS:
Soft Real-Time: En estos sistemas, cumplir con los tiempos es importante, pero no crítico. Si se produce un retraso en la ejecución de una tarea, no se produce un fallo catastrófico. Ejemplos incluyen sistemas multimedia, como la transmisión de video en tiempo real.
Hard Real-Time: En este tipo de sistemas, las tareas deben completarse dentro de un plazo estricto. Cualquier retraso puede resultar en un fallo del sistema. Un ejemplo sería el sistema de control de un airbag en un automóvil, donde cualquier retraso podría tener consecuencias graves.
Implementación de FreeRTOS en Arduino y ESP32 🛠️
FreeRTOS es una de las implementaciones más populares de RTOS para microcontroladores como Arduino y ESP32. Te permite crear múltiples tareas, asignar prioridades y gestionar la ejecución de cada tarea en tiempo real.
Ejemplo de FreeRTOS en ESP32:
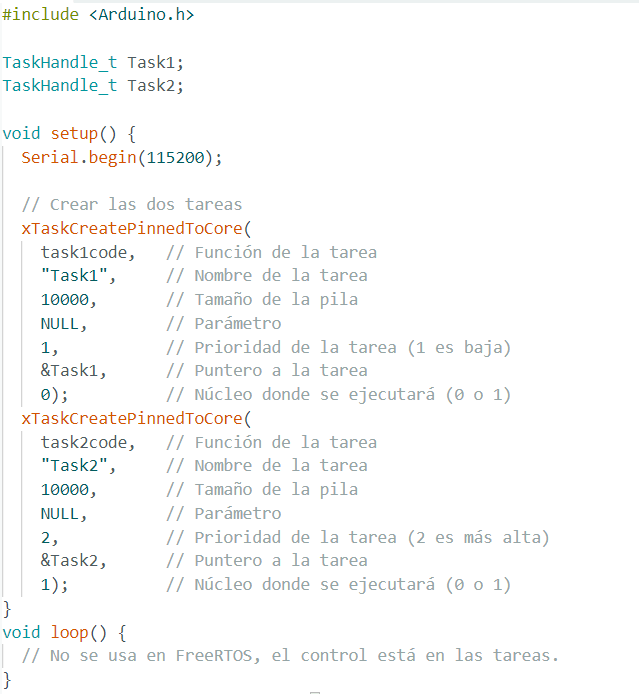
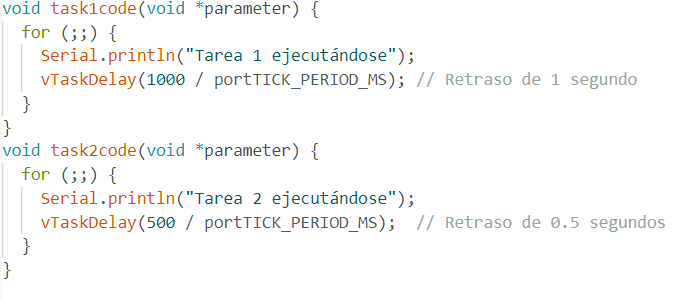
En este ejemplo, estamos ejecutando dos tareas en un ESP32 utilizando FreeRTOS. La tarea 1 tiene una prioridad baja y se ejecuta cada segundo, mientras que la tarea 2, con prioridad más alta, se ejecuta cada 0.5 segundos. Este código muestra cómo gestionar tareas concurrentes de manera eficiente.
Planificación de Tareas en RTOS 📋
Un aspecto clave de un RTOS es su capacidad para planificar tareas de manera eficiente. Las tareas pueden tener diferentes prioridades, y el sistema operativo se asegurará de que las de mayor prioridad se ejecuten antes que las de menor prioridad, permitiendo que las tareas críticas obtengan los recursos de CPU cuando lo necesiten.
Tipos de Planificación:
- Planificación por Prioridad: Las tareas con mayor prioridad tienen acceso preferente a la CPU.
- Round Robin: Las tareas se ejecutan por turnos durante intervalos de tiempo predeterminados.
- Planificación Preemptiva: Si una tarea de mayor prioridad necesita ejecutarse, interrumpe la tarea actual para darle acceso inmediato a la CPU.
Aplicaciones de RTOS en el Mundo Real 🌐
Un RTOS es esencial en sistemas embebidos que requieren un comportamiento preciso y predictivo. Algunas aplicaciones comunes incluyen:
- Drones: Para gestionar sensores, control de vuelo y cámaras en tiempo real.
- Automóviles: Sistemas de seguridad como el control de frenos ABS o el despliegue de airbags.
- Dispositivos médicos: Monitoreo de signos vitales y control de dispositivos en tiempo real.
Ventajas de Usar un RTOS en Sistemas Embebidos 🚀
- Eficiencia en el uso de recursos: Aprovecha al máximo la capacidad del microcontrolador.
- Tiempos de respuesta garantizados: En sistemas críticos, asegura que las tareas se ejecuten dentro de los plazos establecidos.
- Escalabilidad: Ideal para proyectos que requieren gestionar múltiples procesos simultáneamente.
📢 ¡Gracias por explorar la programación en tiempo real conmigo! 📘
Espero que esta guía te haya proporcionado una visión clara sobre cómo usar un RTOS para programar tareas en tiempo real en tus proyectos. Si tienes experiencias trabajando con RTOS o quieres compartir tus ideas para nuevos proyectos, ¡déjalos en los comentarios! 📝
🔔 No te pierdas nuestras futuras publicaciones, donde seguiremos explorando más técnicas avanzadas de programación y control. 🌐
🤝 Únete a nuestra comunidad para compartir tus proyectos y conocimientos sobre la programación en tiempo real. 💬
📷 Comparte tus resultados: ¿Has trabajado con RTOS en tus proyectos? ¡Queremos ver cómo lo has implementado y los resultados que has obtenido! 🛠️
🌟 Sigue aprendiendo y desarrollando tus habilidades: Mantente activo en Hive para seguir desarrollando sistemas en tiempo real y llevar tus proyectos al siguiente nivel. 🚀✨
¡Hasta la próxima, y sigue optimizando tus proyectos en tiempo real con RTOS! 🕒⚙️
[ENG]
Hello everyone passionate about electronics and programming! 👋
Today we are going to dive into the fascinating world of Real-Time Task Scheduling using a Real-Time Operating System (RTOS). This approach is essential for applications that require fast and predictable response, such as embedded systems, robotics, automobiles, and IoT devices. In this post, I will walk you through the key concepts of RTOS, how it works, and how you can implement it in projects with microcontrollers like Arduino or ESP32. 🚀💡
What is an RTOS (Real-Time Operating System)? 🕒
A RTOS (Real-Time Operating System) is an operating system designed to manage tasks that must meet strict timing constraints. Unlike a general operating system, an RTOS ensures that tasks are executed at the right time with the right priority, maintaining predictability and minimizing latency time.
Key Features:
- Deterministic multitasking: Manages multiple tasks simultaneously, ensuring that the most important ones are executed first.
- Task scheduling: Based on priorities, where critical tasks are executed before other lower priority tasks.
- Fast interrupts: An RTOS is capable of handling hardware interrupts with fast response times.
Common RTOS examples:
- FreeRTOS: One of the most popular RTOS and widely used in microcontrollers such as ESP32 and STM32.
- ChibiOS: Lightweight and efficient operating system for embedded systems.
- VxWorks: RTOS used in industrial and aerospace applications.
Why Use an RTOS in Microcontrollers? ⚙️
In projects with microcontrollers, it is often necessary to manage multiple tasks simultaneously, such as reading sensors, controlling motors, and managing communication. An RTOS facilitates this efficient task management, ensuring that each task is executed at the right time without unnecessary interference.
Benefits of Using an RTOS:
- Multitasking Management: Allows multiple tasks to be executed without interruptions and with predictable response times.
- CPU Time Optimization: By dividing processing time between tasks according to their priority.
- Precise Control: Ideal for real-time control systems, such as drones, security systems, or medical applications.
Real-Time Tasks: Soft Real-Time vs. Hard Real-Time 🕑🕛
There are two types of real-time systems that you should be aware of when working with RTOS:
Soft Real-Time: In these systems, meeting timings is important, but not critical. If there is a delay in the execution of a task, a catastrophic failure does not occur. Examples include multimedia systems, such as real-time video streaming.
Hard Real-Time: In these types of systems, tasks must be completed within a strict deadline. Any delay can result in a system failure. An example would be an airbag control system in a car, where any delay could have serious consequences.
FreeRTOS Implementation on Arduino and ESP32 🛠️
FreeRTOS is one of the most popular RTOS implementations for microcontrollers such as Arduino and ESP32. It allows you to create multiple tasks, assign priorities, and manage the execution of each task in real time.
FreeRTOS example on ESP32:
In this example, we are running two tasks on an ESP32 using FreeRTOS. Task 1 has a low priority and runs every second, while Task 2, with a higher priority, runs every 0.5 seconds. This code shows how to handle concurrent tasks efficiently.
Task Scheduling in RTOS 📋
A key aspect of an RTOS is its ability to efficiently schedule tasks. Tasks can have different priorities, and the operating system will ensure that higher priority tasks are executed before lower priority tasks, allowing critical tasks to get CPU resources when they need them.
Types of Scheduling:
- Priority Scheduling: Tasks with higher priority are given preferential access to the CPU.
- Round Robin: Tasks are executed in turns during predetermined time intervals.
- Preemptive Scheduling: If a higher priority task needs to run, it interrupts the current task to give it immediate access to the CPU.
Real World Applications of RTOS 🌐
An RTOS is essential in embedded systems that require accurate and predictive behavior. Some common applications include:
- Drones: To manage sensors, flight control, and cameras in real time.
- Automobiles: Safety systems such as ABS brake control or airbag deployment.
- Medical devices: Monitoring vital signs and controlling devices in real time.
Advantages of Using an RTOS in Embedded Systems 🚀
- Efficiency in the use of resources: Makes the most of the capacity of the microcontroller.
- Guaranteed response times: In critical systems, it ensures that tasks are executed within the established deadlines.
- Scalability: Ideal for projects that require managing multiple processes simultaneously.
📢 Thank you for exploring real-time programming with me! 📘
I hope this guide has provided you with a clear insight into how to use an RTOS to schedule real-time tasks in your projects. If you have experiences working with RTOS or want to share your ideas for new projects, leave them in the comments! 📝
🔔 Don't miss our future posts, where we will continue to explore more advanced programming and control techniques. 🌐
🤝 Join our community to share your projects and knowledge about real-time programming. 💬
📷 Share your results: Have you worked with RTOS in your projects? We want to see how you implemented it and the results you obtained! 🛠️
🌟 Keep learning and developing your skills: Stay active on Hive to continue developing real-time systems and take your projects to the next level. 🚀✨
Thanks for your contribution to the STEMsocial community. Feel free to join us on discord to get to know the rest of us!
Please consider delegating to the @stemsocial account (85% of the curation rewards are returned).
You may also include @stemsocial as a beneficiary of the rewards of this post to get a stronger support.
Congratulations @profwhitetower! You have completed the following achievement on the Hive blockchain And have been rewarded with New badge(s)
You can view your badges on your board and compare yourself to others in the Ranking
If you no longer want to receive notifications, reply to this comment with the word
STOP