Aerial Photography and 3D modelling Process
AIM:
To produce an orthophoto map and topographical map of the area.
OBJECTIVES:
The objectives of this project are:
- To collect ground control points (GCP) and control points (CP) using GNSS method.
- To generate Orthophoto using Pix4D Mapper software
- To generate Digital Surface Model(DSM) using Pix4D Mapper software
- To generate a topographical Map using Pix4D Mapper software
MAIN EQUIPMENT USED:
- Delair UX11 UAV with Accessories
- Trimble R8 GNSS with Accessories
SCOPE OF THE PROJECT
- Reconnaissance
- Flight planning
- Flight mission
- Data processing
- Analysis of results
- Plan production/printing
RECONNAISSANCE:
Office Reconnaissance
Before embarking on the field reconnaissance useful information relating to the project site was collected. The google earth image of the area was downloaded and necessary information was extracted and also an already existing survey plan was collected from the client.Field Reconnaissance
The project site was visit to have a general overview of the project area and also assess the client’s requirement. Appraisal of possible take-off and Landing area were chosen. Risk Assessment on the take-off and landing area was also taken into consideration. The villages within our area of work were visited to sensitize them to our mission and the need for them to give us their maximum Cooperation. There agreed to give us two community personnel to assist us and act as their representative during the project.
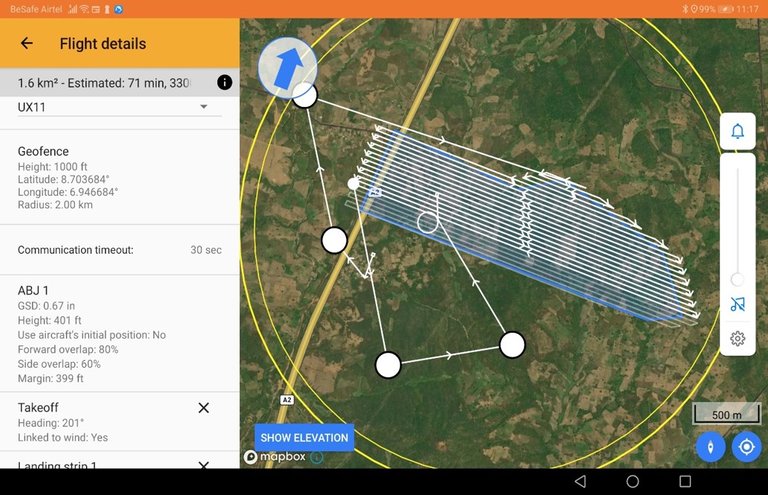
Preparation of Flight Plan:
On returning from the reconnaissance to the office, the methodology to achieve a smooth, accurate, and fast execution of the project was decided upon. These included:
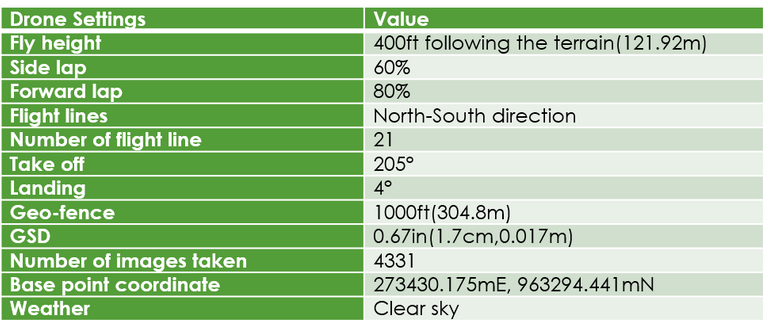
Flight height which was 400ft following the terrain (121.92m)
Forward and side lap which was 80% and 60 % respectively.
Parameters Used For The Project
Field Operation:
Control: A credible control was chosen within the area to be mapped and our Trimble R8 GNSS instrument was mounted throughout the period of the flight. And the Control was used as a Ground Control Point (GCP) (8 GCP and 12 CP)
Flight Operation: DELAIR UX11 is a hand-launch UAV mounted with a PPK and is operated by autopilot. The flight plan is uploaded into the UAV memory through the software on a mobile tablet called DELAIR flight deck.
While the flight was going on the BASE STATION was on.
DOWNLOADING AND PROCESSING OF IMAGES:
DATA PROCESSING:
Data processing involved converting the data obtained into useful information. The raw captured data(DLC) was downloaded from the drone into the computer through a data cable.
To accomplish this, DELAIR After Flight deck software is used. DELAIR after flight deck software is an intuitive desktop application to import, qualify, adjust, and export DELAIR UX11 data. As each image is georeferenced during its acquisition, it can be displayed geographically in DELAIR After Flight software. The software enables the user to convert and sort the thousands of images acquired during flight according to different parameters.
Features include importing flight folders from an aircraft(drone), applying filters to the data(PPK position correction type, Height, Attitude (roll, pitch, yaw)), viewing and selecting images, and exporting the selected images and metadata to various format and third-party tools. It also enables PPK (Post-Processing Kinematics) baseline processing and filtering of high-accuracy data.
Exported data:
• Images in JPEG or TIFF, with Exif/XMP metadata
• PDF report for exported data and selected images
PIX4DMAPPER
The exported images from DELAIR After Flight deck us brought into this photogrammetric software called PIX4Denterprise for the final map making i.e. the mosaicking, contour generation, Orthophoto production, etc
The Processes inside the Pix4Dmapper
- Initial processing
- Point cloud and mesh(densification)
- DSM, orthomosaic production
INITIAL PROCESSING
This process is actually the bedrock of the rest processes
- In Key-points extraction: Identify specific features as key-points in the images.
- Key-points matching: Find which images have the same key-points and match them.
- Camera model optimization: Calibrate the internal (focal length,) and external parameters (orientation,) of the camera.
- Geolocation GPS/GCP: Locate the model if geolocation information is provided.
Manual Tie Points are created during this step. These are the basis for the next steps of processing.
When starting initial processing, Pix4Dmapper first computes key-points on the images. It uses these key-points to find matches between the images. From these initial matches, the software starts carrying out relative orientation, absolute orientation(involving GCPs)
POINT CLOUD AND MESH
This step builds up on the tie point created in phase one which is used in the 3D reconstruction of the model (i.e. The X, Y, Z position, the color information, shape of the model, texture from the images, etc. )
DSM, ORTHOMOSAIC AND INDEX
This step enables the creation of:
Digital Surface Model (DSM): The digital surface model (DSM) is a 3-D model of the mapped area, it represents the MSL elevations of the reflective surfaces of trees, buildings, and other features elevated above the “Bare Earth”. in summary it represents the earth’s surface and includes all objects on it.
ORTHOMOSAIC: The creation of the Orthomosaic is based on orthorectification. This method removes the perspective distortions from the images.
The orthomosaic is a 2D map. Each point contains X, Y, and color information(color balancing is applied). The orthomosaic has a uniform scale and can be used for 2D measurements (distance, surface)
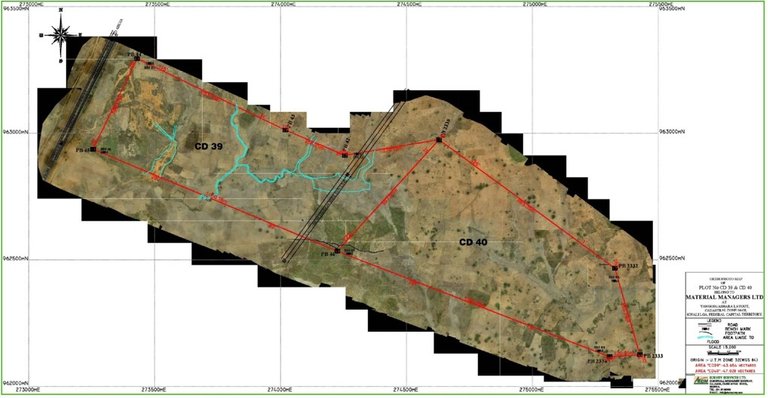
ORTHOMOSAIC MERGED WITH THE SURVEY PLAN OF THE PERIMETER
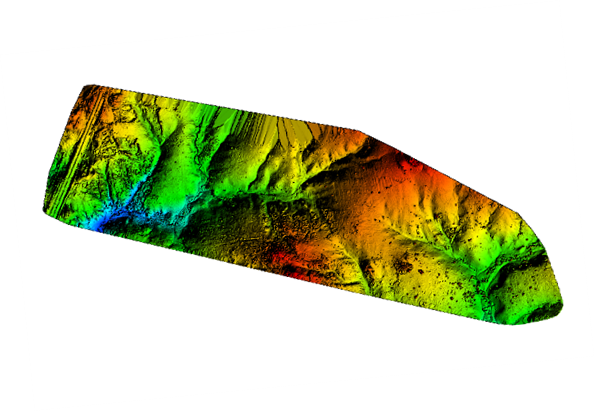
DIGITAL SURFACE MODEL

TOPOGRAPHICAL MAP PRODUCED USING PIX4DMAPPED
The above pictures were captured in the processing using different required software
Yay! 🤗
Your content has been boosted with Ecency Points, by @johnuko.
Use Ecency daily to boost your growth on platform!
Support Ecency
Vote for new Proposal
Delegate HP and earn more